Objective
Create a drone that can drop a red or blue ball based off which color it detects in front of it. It also must only drop if it is a certain distance away.
Execution
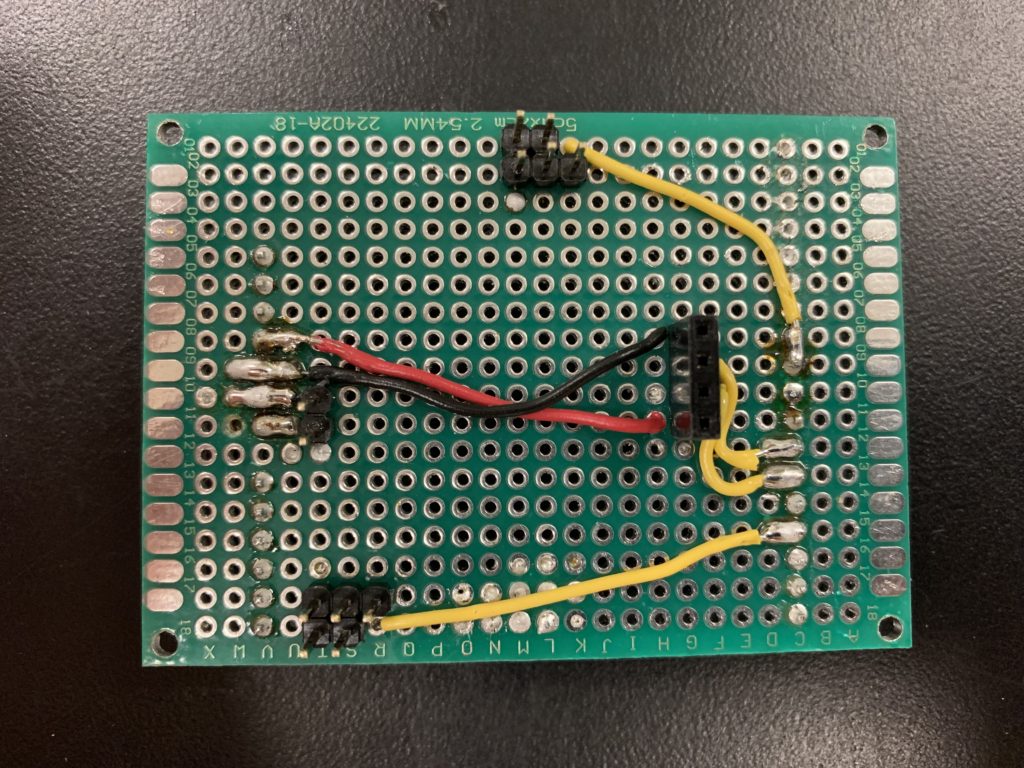
We used an Arduino, “PixyCamera”, and ultrasonic sensor to accomplish this task. The whole drone was either laser cut or 3D-printed, so the only tool required for assembly was a screwdriver. The landing gear featured an “active” design, meaning it was able to absorb impact with springs that were placed inside each landing gear.

Personal Role
I was the team lead for a team of six that was involved in this drone. I designed the main chassis and designed/fabricated the circuit. I was also responsible for communicating with the rest of the design team, making sure parts were compatible with each other. This meant I put together the SolidWorks assembly (pictured below) to ensure compatibility before fabrication. Several revisions were made on each part. Rapid prototyping was streamlined with 3D printing and laser cutting.